产品中心
通用具身机器人

全能型
通用机器人
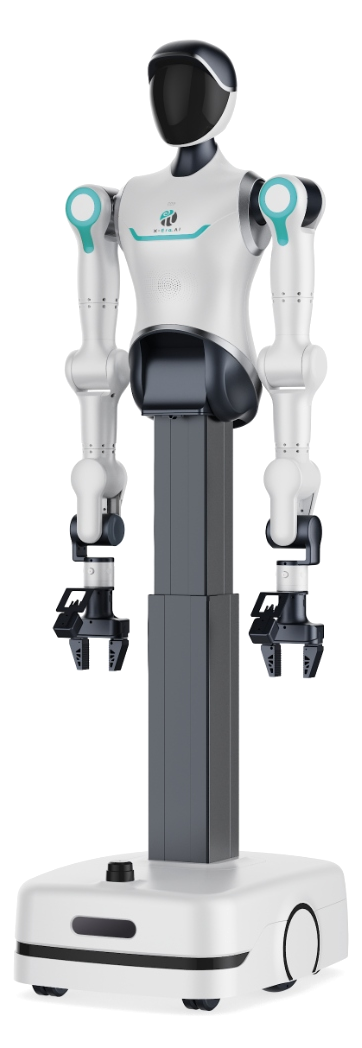
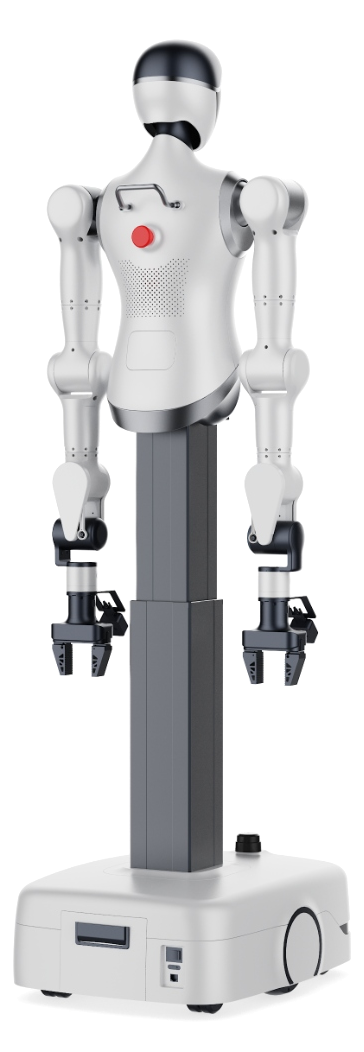
搭载世界动作模型(VWA),集感知、认知、决策、规划与行动于一体,可灵活适配多场景作业需求。
1.35–1.7m
静态高度
20DoF
全身自由度
360°
准全景感知
基础
参数
参数
- 静态高度 1.35–1.7m
- 垂直工作范围 0–2.1m
- 升降行程 1.1m
- 底盘尺寸 580×550×260mm
- 整机重量 ~70kg(含电池)
- 水平作业臂展 ~0.74m(不含末端)
- 网络与拓展 USB3.0/HDMI/网口
计算平台
与续航
与续航
- 基础算力 12核 Jetson AGX Orin
- 算力 275 TOPS
- 电池容量 51.2V 30Ah 三元锂
- 单次充电运行 6–8h
- 充电方式 接触式
运动学
与自由度
与自由度
- 全身自由度 20 DoF
- 头部(俯仰、旋转) 2 DoF
- 单臂自由度 7 DoF
- 末端执行器 支持二指·三指·灵巧手等形态定制
- 腰部俯仰 1 DoF
- 腿部升降 1 DoF
- 移动底座 2 主动自由度
负载、速度
与稳定性
与稳定性
- 底盘驱动方式 双轮差速
- 单臂负载 3kg
- 升降系统承载 ≥60kg(含双臂及负载)
- 底盘移动速度 1.76 m/s(最大)
- 升降速度 60 mm/s
- 最大爬坡能力 5°
- 越障能力 越坎20mm / 过缝40mm
末端
执行器
执行器
- 快换要求 支持夹爪模块快换
- 2指平行夹爪行程 90mm
- 2指平行夹爪夹持力 30N
- 2指平行夹爪重复精度 ±0.02mm
感知
与传感器
与传感器
- 头部环境感知 RGB-D 双目相机
- 手部距离感知 RGB-D 相机
- RGB 分辨率 1920×1080 @ 60fps
- Depth 分辨率 1280×800 @ 30fps
- 音频传感 IMU·超声波·6路定向麦克风·双3W高保真音响
- 导航传感 360°·≥16线 3D激光雷达
- 协调控制 手臂具备力反馈控制
- 自主导航 实时建图·定点导航·智能避障